Implementing and visualizing Gram-Schmidt orthogonalization
In linear algebra, orthogonal bases have many beautiful properties. For example, matrices consisting of orthogonal column vectors (a. k. a. orthogonal matrices) can be easily inverted by just transposing the matrix. Also, it is easier for example to project vectors on subspaces spanned by vectors that are orthogonal to each other. The Gram-Schmidt process is an important algorithm that allows us to convert an arbitrary basis to an orthogonal one spanning the same subspace. In this post, we will implement and visualize this algorithm in 3D with a popular Open-Source library manim.
Gram-Schmidt process
Consider some arbitrary -dimensional subspace
spanned by linear independent vectors . We want to find the following basis spanning the same subspace:
The Gram-Schmidt process is a typical dynamic programming algorithm, because the core idea behind it is to make an orthogonal basis assuming is already such a basis. The construction works as follows:
Step 1: For , we can just take and normalize it:
Step 2: must be orthogonal to , so we need to find out the component of that is orthogonal to . We can do this by subtracting the projection of onto from :
The second equality holds because we normalized the vector and the denominator is thus equal to one.
This step can be visualized as follows:

Finally, we need to normalize the resulting vector:
Step 3: must be orthogonal to , which is already an orthogonal basis, so must be orthogonal to both and which means that we need to subtract the projections of onto both and from :
As in the previous step, we normalize the vector:
More generally, we can write the formulas for step as follows:
Step i: must be orthogonal to . Because in the previous steps we made an orthogonal basis, it follows that must be orthogonal to each vector from . We therefore subtract projections of onto for all from :
Now we only need to normalize the new basis vector:
Implementation & Visualization
We can implement the Gram-Schmidt orthogonalization algorithm in Python the following way:
import numpy as np
def gram_schmidt(A):
(n, m) = A.shape
for i in range(m):
q = A[:, i] # i-th column of A
for j in range(i):
q = q - np.dot(A[:, j], A[:, i]) * A[:, j]
if np.array_equal(q, np.zeros(q.shape)):
raise np.linalg.LinAlgError("The column vectors are not linearly independent")
# normalize q
q = q / np.sqrt(np.dot(q, q))
# write the vector back in the matrix
A[:, i] = q
The input basis vectors are given as columns of the matrix, which then get’s modified in-place by the algorithm. It is important to verify that is not zero, because if , then it means that and is therefore not a basis (vectors are not linearly independent).
In order to visualize the algorithm, I added a few yield-statements to the above implementation, because they allow us to elegantly separate the algorithm from the code visualizing it. For the visualization itself, I will use the popular manim library:
# file: "gram-schmidt.py"
from manimlib.imports import *
from enum import Enum
class Action(Enum):
UPDATE_MATRIX_REMOVE_Q = 1
ADD_PROJECTION = 2
REMOVE_PROJECTIONS_SET_Q = 3
NORMALIZE_Q = 4
def gram_schmidt(A):
(n, m) = A.shape
for i in range(m):
q = A[:, i] # i-th column of A
for j in range(i):
yield (Action.ADD_PROJECTION, np.dot(A[:, j], A[:, i]) * A[:, j])
q = q - np.dot(A[:, j], A[:, i]) * A[:, j]
if np.array_equal(q, np.zeros(q.shape)):
raise np.linalg.LinAlgError("The column vectors are not linearly independent")
yield (Action.REMOVE_PROJECTIONS_SET_Q, q)
# normalize q
q = q / np.sqrt(np.dot(q, q))
yield (Action.NORMALIZE_Q, q)
# write the vector back in the matrix
A[:, i] = q
yield (Action.UPDATE_MATRIX_REMOVE_Q, None)
class GramSchmidt(ThreeDScene):
CONFIG = {
"x_axis_label": "$x$",
"y_axis_label": "$y$",
"basis_i_color": GREEN,
"basis_j_color": RED,
"basis_k_color": GOLD,
"q_color": PURPLE,
"q_shifted_color": PINK,
"projection_color": BLUE
}
def create_matrix(self, np_matrix):
m = Matrix(np_matrix)
m.scale(0.5)
m.set_column_colors(self.basis_i_color, self.basis_j_color, self.basis_k_color)
m.to_corner(UP + LEFT)
return m
def construct(self):
M = np.array([
[1.0, 1.0, -3.0],
[3.0, 2.0, 1.0],
[-2.0, 0.5, 2.5]
])
axes = ThreeDAxes()
axes.set_color(GRAY)
axes.add(axes.get_axis_labels())
self.set_camera_orientation(phi=55 * DEGREES, theta=-45 * DEGREES)
basis_helper = TextMobject("$ a_1 $", ",", "$ a_2 $", ",", "$ a_3 $")
basis_helper[0].set_color(self.basis_i_color)
basis_helper[2].set_color(self.basis_j_color)
basis_helper[4].set_color(self.basis_k_color)
q_helper = TextMobject("Current $ q_i $ vector")
q_helper[0].set_color(self.q_color)
q_shifted_helper = TextMobject("Shifted $ q_i $ vector")
q_shifted_helper[0].set_color(self.q_shifted_color)
projection_helper = TextMobject("Projection vectors")
projection_helper[0].set_color(self.projection_color)
helper = VGroup(
projection_helper,
q_helper,
q_shifted_helper,
basis_helper
)
helper.arrange(
DOWN,
aligned_edge = RIGHT,
buff=0.1
)
helper.to_corner(UP + RIGHT)
self.add_fixed_in_frame_mobjects(helper)
# matrix
matrix = self.create_matrix(M)
self.add_fixed_in_frame_mobjects(matrix)
# axes & camera
self.add(axes)
self.begin_ambient_camera_rotation(rate=0.15)
i_vec = Vector(M[:, 0], color=self.basis_i_color)
j_vec = Vector(M[:, 1], color=self.basis_j_color)
k_vec = Vector(M[:, 2], color=self.basis_k_color)
self.play(
GrowArrow(i_vec),
GrowArrow(j_vec),
GrowArrow(k_vec),
Write(helper)
)
self.wait()
projection_vectors = []
q = None
for (action, payload) in gram_schmidt(M):
if action == Action.UPDATE_MATRIX_REMOVE_Q:
assert not q is None
M_rounded = np.round(M.copy(), 2)
self.remove(matrix)
matrix = self.create_matrix(M_rounded)
self.add_fixed_in_frame_mobjects(matrix)
i_vec_new = Vector(M[:, 0], color=self.basis_i_color)
j_vec_new = Vector(M[:, 1], color=self.basis_j_color)
k_vec_new = Vector(M[:, 2], color=self.basis_k_color)
animation_time = 2.0
self.play(
FadeOut(q, run_time=animation_time * 0.75),
ReplacementTransform(i_vec, i_vec_new, run_time=animation_time),
ReplacementTransform(j_vec, j_vec_new, run_time=animation_time),
ReplacementTransform(k_vec, k_vec_new, run_time=animation_time)
)
self.wait()
i_vec, j_vec, k_vec = i_vec_new, j_vec_new, k_vec_new
elif action == Action.ADD_PROJECTION:
p = Vector(payload, color=self.projection_color)
projection_vectors.append(p)
self.play(GrowArrow(p))
self.wait()
if len(projection_vectors) == 2:
first_projection_end = projection_vectors[0].get_end()
p_shifted = Arrow(first_projection_end, first_projection_end + payload, buff=0, color=self.projection_color)
projection_vectors[1] = p_shifted
self.play(ReplacementTransform(p, p_shifted))
self.wait()
elif action == Action.REMOVE_PROJECTIONS_SET_Q:
if not projection_vectors:
q = Vector(payload, color=self.q_color)
self.play(GrowArrow(q))
self.wait()
continue
last_projection_end = projection_vectors[len(projection_vectors) - 1].get_end()
q_shifted = Arrow(last_projection_end, last_projection_end + payload, buff=0, color=self.q_shifted_color)
self.play(GrowArrow(q_shifted))
self.wait()
q = Vector(payload, color=self.q_color)
self.play(
ReplacementTransform(q_shifted, q),
*[FadeOut(p) for p in projection_vectors]
)
self.wait()
projection_vectors = []
elif action == Action.NORMALIZE_Q:
q_normalized = Vector(payload, color=self.q_color)
self.play(ReplacementTransform(q, q_normalized))
self.wait()
q = q_normalized
else:
assert False
self.wait(1)
assert np.allclose(M.T @ M, np.identity(3))
self.wait(15)
By rendering the animation with manim gram-schmidt.py GramSchmidt -m -p, we get:
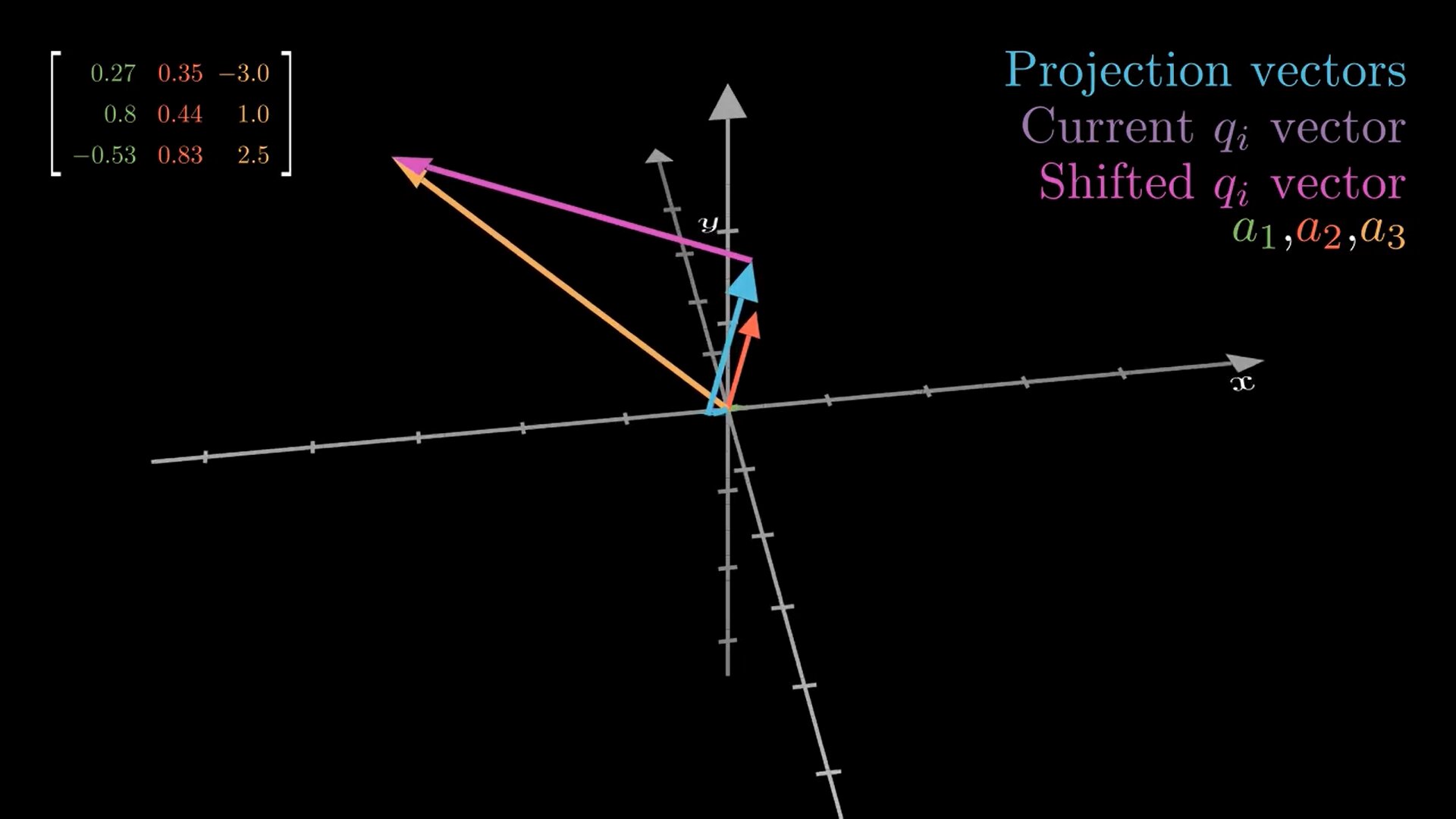
Vector colors in the animation mean the following:
- The green, red and gold vectors are initially the , and vectors, respectively. During the algorithm they get iteratively replaced by the -vectors, so that at the end these vectors represent , and , respectively (as we can see, they are orthogonal to each other at the end).
- The blue vectors are the projections of onto , .
- The pink vector is the shifted vector at step .
- The purple vector is the vector at step (pink vector moved to the origin). This vector then gets normalized.